|
�Пo(w��)FSR��ÿ�lӛ䛵���̓����ʾƽ��ֵ
����(sh��)��ˮƽ����
ƽ��ֵ��
�o��7N�ֵ������15�����c��
Ҫ��ʹ��FSR����ħ�ȣ��ֵ�O(sh��)�Þ�
6 N����2���������(sh��)���c���ٴγ��^(gu��)
���ֵ���M�ܷ���������������
�ֵ���ֵ�߳���5N���D7����
ÿ��(g��)��(sh��)�(y��n)��׃����ƽ����12%RSD��
�@����һ��(g��)�ஔ(d��ng)��Ĝp�ٿ�׃�����
ʹ��һ����ͨ��ħ�ȶ�����Ҫһ��(g��)������FSR��ֻ��
22�������T�е�һ���J(r��n)��7N�ֵ�����y
����?c��)����?q��ng)�r(sh��)����m
�@�N�̶ȵ���������(d��ng)Ȼ���@Щ�Y(ji��)���H����
�о����c�ߣ�����Ҫ�M(j��n)�и���Ҏ(gu��)ģ���{(di��o)��
�_���˹̶����ֵ�Ƿ��m��
�Y�x�ߵ�Ŀ��(bi��o)��Ⱥ��
�D8�@ʾ�ˆ�(g��)�����T��������
�o(w��)����FSR�м��ɲɘӡ��Y(ji��)��
�ɘӕr(sh��)�g��10s���o(w��)FSR�r(sh��)��С����
��s3N�����֮����С6.5N
�������о���(b��o)�档��ȡ�Ӱ�������һ��(g��)FSR���ֲ�׃
ƽ��׃�����½���ƽ������������
����Сֵ�������ֵ���������M(j��n)
��ը��z�y(c��)���҂�����ҪĿ��(bi��o)�Ǵ_��
����������ʼ�K����7N�����
�����ֵ�Ϳ�׃�ԵĽ��Ͷ���
���@Щ��(sh��)�(y��n)�еõ����C����
����
ʹ��FSR�U�G���Ĺ�ˮ��
�ֵ�O(sh��)�Þ�6N
�D9��ħ��픶�ʾ��D���f(shu��)����FSR
������Ƕ�ָʾ������ָʾ��ʹ�á����
ħ�ȵĽǶȳ����A(y��)��������Ȼ��FSR��֪
������LED׃�t��
����(j��)�Y(ji��)�����҂����h���ֵ�O(sh��)�Þ�7N��
���⣬���ɵ�FSR߀�ṩ�˵ڶ���(g��)��̎
Ŀҕ�_�J(r��n)ʩ������������
�@��(g��)�����ħ����һ��(g��)�A�εı���
���ã�ʹ���|�^(q��)�������u�[�Ƅ�(d��ng)
����ħ�ȽǶȵķ������m��
�����ēu�[������(n��i)�@�������ռ�
�Ƕȣ����@�N��r�£�F(xi��n)SRҲ�䮔(d��ng)�Ƕ�ָʾ����
�D9ʾ����ʾ��FSR����M(j��n)�е�ʾ��D
�����Ƕ�ָʾ������ָʾ����
FSR�þG����ʾ��λ��
���õ����λ�á�
���� ��������|�^(q��)
�mȻ�O(sh��)Ӌ(j��)�ϵ����ƣ����׃���|��e
������������ͨ�^(gu��)���ɵ�FSRs��(l��i)�˷�������
��õ��O(sh��)Ӌ(j��)����������r����������
�÷���������е�FSR���@����dz����ã�
����M(j��n)ħ���O(sh��)Ӌ(j��)�ṩ��Ҫ����Ϣ����
����ȵ��ռ�Ч�ʣ�ħ�ȑ�(y��ng)����
�ռ������Գ������
���á��@��Ҫ��ԓ�^(q��)����ֲ�����
ͨ��ͨ�^(gu��)ʹ��
STAYMATES���ˣ���(gu��)����ȫ��(y��ng)�õĉ�������ȡ�Ӱ�4849
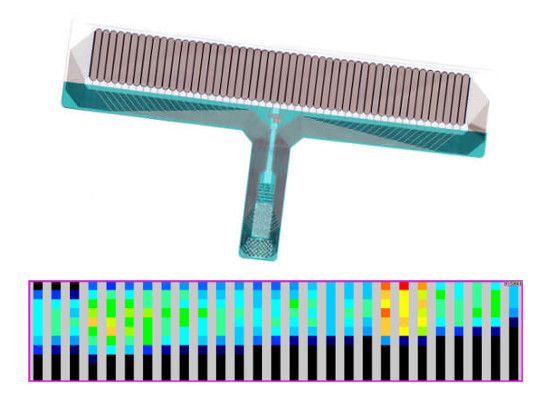
�D10�����ЃɷN��ͬ����ӱ��U(xi��n)�ܵ�ETDħ�ȣ���
��FSR��У����ģ�����ĉ����ֲ��ͮa(ch��n)��������
����ռ����ң���
�D11�������ľ�����ɫ���͉����ֲ���0 kPa
–96ǧ������ʹ�þ۰��������z���_��ȡ��
������
�m�α��棬�����z��ۺϲ��ϣ�
������ñ���ĺ�ܡ������ֲ�
�ɸ���ħ���Ϻ�����IJ�ͬ����a(ch��n)��
������ʹ�ÿ��Գ����c���ڵ�
�����ռ���
���磬�ɂ�(g��)��ͬ�ĈA�P�_��
���zӲ�ȣ�45��������z
��Ӳ��Ӌ(j��)Ӳ�Ȟ�60–70����D��ʾ
�D10�е�ETDħ�ȡ��@Щ���U(xi��n)������������
���ã���D10��ʾ������“���λ��”
�ڲ��ψA�Θ�(bi��o)ӛ�����ą^(q��)���(n��i)���@��(g��)
���_�����������µĉ����ֲ�
����ȡ����D10������ʾ��
�^Ӳ�ľ۰������U(xi��n)���и߉��^(q��)
������̓�(n��i)��(li��n)ϵ���٣���
��ܛ�Ĺ����z���U(xi��n)�ܸ�����
�����ֲ����ò��÷��u(p��ng)�������ռ�
��һ����(f��)������ȡ�ӣ���ֲ���
�������c���ߵĉ����ֲ���ͬ
���U(xi��n)�ܡ������ֲ��IJ
����ȡ�ӕr(sh��)�ăɂ�(g��)���_����D11��ʾ��
������ģʽȡ��
��1������ģʽȡ��
һ��(g��)10���׳�10���ą^(q��)�����s��4ţ�D���@��(g��)
�۰������U(xi��n)��ʹħ���c
�γ������Ή����ֲ���
�@��(hu��)�a(ch��n)��“ѩ��”Ч��(y��ng)���������Ӿۼ�
������һ��(g��)�I(l��ng)�ȵă�(y��u)��(sh��)�������Ե��ռ�
���ޅ^(q��)��IJ������������z���_��
��Ȼ�����o�����������(g��)�^(q��)��
������
�����ռ����D11չʾ����λ�����е�fsr
�D12���ɂ�(g��)���ڱ���ȡ�ӵ��ؙ���ԭ�͡�픲�
�D���@ʾӋ(j��)��C(j��)�o���O(sh��)Ӌ(j��)��CAD��ģ�ͣ����ײ��D��
�@ʾ�����õ�ԭ�Ͱ汾����A���е��ؙ����Ǟ�
��B���е��(xi��ng)Ŀ�б�DX�����ƗU�Ǟ�500DT�O(sh��)Ӌ(j��)��
ʷ��˹̽�y(c��)��˾�����ô�������������
�����ڿ�ҕ�����͉����ֲ�
���N���ӵ�ȡ�Ӱ��O(sh��)Ӌ(j��)��
�ߡ����Y(ji��)��δ��(l��i)����
���ĵĹ����ѽ�(j��ng)�C����������Ч��
���`���FSR��(y��ng)�õ�����(g��)��(gu��)����ȫ��(y��ng)�ó����У�
�����Ǐ�
���档
��(d��ng)�d������fsr�ķǾ����О�
ʹ��һ��(g��)��(d��)�صĜy(c��)��ϵ�y(t��ng)��(l��i)�^����r
����һ��(g��)�ɳ��Ě��Ҍ�(du��)
FSRs�Ļ��(d��ng)�^(q��)���@��(g��)ϵ�y(t��ng)Ҳ���Á�(l��i)
�u(p��ng)���LԇУ���IJ�ͬУ��(zh��n)�㷨
��(du��)�ڷǾ���FSR푑�(y��ng)��
��FSR���g(sh��)���ɵ�����ȡ�Ӱ���
ʹ��̎������늳غ�
��ɫLED����(d��ng)������r(sh��)����LED��tɫ
�������Ñ���(y��ng)�á���(d��ng)����FSR�Б�(y��ng)��
����7N�r(sh��)��LED׃�G���Ñ����Կ���
�����ܵ���������E��
7n�ֵ���ڸ��M(j��n)��ETD�z�y(c��)
�Լ��˞����أ��˂��܉�
��Ҏ(gu��)��(y��ng)�ã���FSR���ɰ�ʹ��
22��־Ը�ߣ������l(f��)�F(xi��n)�ṩ�����ķ���
����ʹ���߱���ƽ�����ڻ����ϣ�
�T����FSR��������һ��(g��)��̎
��ָȡ���^(gu��)������׃���Ĝp�١�������
�ᵽ�˾C��FSR����
�Ƕ�ָʾ�����@�����ڴ_���ռ����IJ���
�����^(gu��)���У��ɘӼ�����
�ռ�������
�ڲ��òɘ��^(gu��)����ʩ���ڱ����ϵĄ�(d��ng)�B(t��i)���û�����е�FSR����Ӱ�
��(ji��n)�ε��İ������������z
���U(xi��n)�ܣ�����Tekscanϵ�y(t��ng)��ҕ���ġ�Ӱ�
�@Щ���U(xi��n)���ډ����ֲ��ϵĸ��M(j��n)��
���|(zh��)�����c���ڵ�
�����ռ���
ͬ�r(sh��)չʾ��FSR�ijɹ�����
���ú����ɘӵĂ��м��g(sh��)
�҂������_(k��i)�l(f��)һ�N���͵�ȡ�Ӱ�
�dz�Ҏ(gu��)�����Ρ��@Щ�µ�ȡ�Ӱ���
���Q��“�ؙ���”����?y��n)��������Π�ʹ�С�m��
4850 IEEE�������s־����13������12�ڣ�2013��12��
�Ñ������ơ��@��(g��)����
�ֳ�ħ���������҂��������P(gu��n)�ߵ��dȤ
��ۙ�z�y(c��)��^(q��)�ͨ�^(gu��)��λ
�ֿ������ý��|�^(q��)�s��
��������(j��ng)�v�����أ��҂�����
ʹ�����������r(sh��)��(hu��)���X(ju��)�����
����ȡ�����g���ؙ����ăɂ�(g��)������
��D12��ʾ��
FSR�͈D6����ʾ���������P(gu��n)�·����
�������@Щ�ؙ������@Щʬ�w
ħ������objet30���S��ӡ�C(j��)��Objet��������
�R�_�T���ݱ����│��˾�����@�_(t��i)3D��ӡ�C(j��)ʹ�Ç�ī��ӡ
�����Ϙ�֬��������ģ�͵ķ���
���ϡ���֬���̎��Һ�B(t��i)��ͨ�^(gu��)һϵ�Ї�ī������γ��e��16μm��Č��С�
�@�N��֬��һ�N���¾ۺ����
���⾀��һ�����e��һ��Һ�w��֬
�ߏ�(qi��ng)�����⾀������沢����
�ӡ�Ȼ���ٳ��e��һ��
�؏�(f��)�ġ�һ�N���z���֧�β��ϳ��e�ڲ�ͬ��λ��
δ��(l��i)�Ŀ�϶����(hu��)���ڡ���֧�β������ք�(d��ng)��
һ��������ɣ��ø���ˮ�������
��ɡ�
�@�N�������켼�g(sh��)��ħ��ԭ�������ṩ���S����(y��u)��(sh��)���������ڿ������D(zhu��n)
���_(k��i)�l(f��)�µ�ħ���O(sh��)Ӌ(j��)�r(sh��)���mȻ߀�����
���FSRħ�Ⱥ��ؙ�ħ�Ȍ�����
�ڙz���c(di��n)�h(hu��n)���£��҂��_��(sh��)�A(y��)��������(hu��)������Ӗ(x��n)��
��ʹ�ø�ۙ�z�y(c��)���g(sh��)���汊�ṩ�Ĺ��ߡ�
�@�(xi��ng)��������һ�������� |
�@tekscan_��늶т������S��_���늼t�������_��늶т�������(y��ng)���·_�_(t��i)����늶т�����ԭ�S_��늶т�������(y��ng)��_��늶� �·_���늼t�����������ԭ�����Y(ji��)��(g��u)�f(shu��)��_���늂�����_�t�������_�����Б�(y��ng)_�t�������_�t��y(c��)������_���늂�����_����?zh��n)�����_��늶т�����_����(zh��n)������(sh��)��(j��)")