|
һ�F�㡣
27
�D16��ĥ�pԇ��е��z��ʧЧ
��3����������ԇ�Y��
���K��ȣ�cm�����ȣ�cm��������cm�����d��lbs�����d��N��σf��Kpa��
1 4.02 8.25 7.51 0.84375 3.753185625 27.8829732
2 3.76 7 6.82 1.375 6.1163025 28.9440923
3 3.75 7.91 5.86�^�߲��m�ò��m��
366.366.363.368.363
�D17����������ԇ�
28
5.0�{��/ƽ��
�����������{����������ͨ�^ʹ���m����ʂ�ʹ�õ�
���ڼ��d��ƽ��������������������ʩ��һ�������ؓ�d
��������ؓ�d�{�������������^����δ������
�������������Ʊ��������ё����ڸ���Ă�����
���ں��̡�
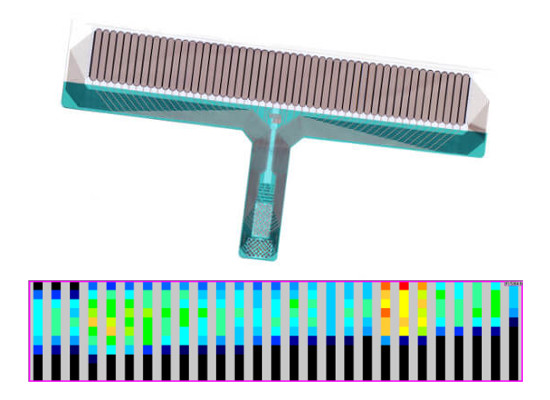
��������������Һ���C�У���̺�ӡ���ĭ���Ϻ�
�z�ϰ�[�D18]���@�������ڮa�������ؓ�d�������o�����������κ�
�p�ġ�һ��һ�ж����������ģ�ý�w�ͽ����ˡ����b�d�_ʼ֮ǰ
����������������M����Ӌ�㣬�Ա㲻�����^ԓ����
�_���������C�����������d�����������¾���������@ʾ
�dz���ƽ���ؓ�d����������һ�����@ʾؓ�d����һ�����@ʾؓ�d
�]�С�Ȼ�����C�O�Þ������d��ģʽ[�D19]���@�Nģʽ�^�m
30��犺������_ʼ����ؓ�d��һ�ж����Ǖr
��Һ���C��ȡ�£������^���؏��M�С�
�D18�����������͌ӵ�Һ���C
29
�D19��Һ���Cģʽ
4.0�YՓ
I-Scan������ϵ�y��һ�N�dz����е��O�䡣���ѽ����S����ʹ��
��ǰ�đ��ú͌���������������һЩ���}
ͨ�^�m����Ӌ�������Á���Q���@Щ������������
�c�������W�M�еČ��dz����ơ��^ȥ�Ľ��
�@Щ���������@һ�I��đ���ʹ��ɞ����W����Ѻ��x
��
���W������ҪĿ����ͨ�^
�����ķ����͑������@�ͬ�rҲ�����{�����M
����Փ���ѽ���������Ҫ���}�Լ���Q������
�@Щ�������İ��b����ˮ��߅�����o��������
ͨ�^����ͬ������ӑՓ���_���p���z��
�����z���Y�Ϸ�ˮ��
���o���������ڌ�������m�ĴŎ��yԇ
�_ʼ�ɡ�
�yԇ�^����Ҫ�������A���M�У����b���yԇ��ˮ
�Լ��yԇĥ�p�����b�C�����p���z���ṩ��һ���dz������
30
�ȵȡ��ڰт���������ˮ��һ��ҹ�����ɹ���
��ˮ�ġ�����ĥ�pԇ���Ը��ɹ������s���
����Ȼ�h���£����������������ı���
���ā��f���yԇ�Y���ǿ϶��ģ��C���@Щ�����Ǻõ�
����ȫ�挍�ĺ��x����
31
�����īI
[1] Izumiyama K.��Wako D.��Shimoda H.��Uto S.��2005�꣬“�����d
���wģ�͜y��”������18�øۿںͺ�����H���h
���O�l���µĹ��̣���2������635-646퓣�Ħ����˹�ˣ����_˹
[2] �������퓡�����˾��[3] Valkonen��J.��Izumiyama��K.��Kujala��P.��2007�꣩�����T���y��
����ģ�ͱ������ϵĉ������d�ɣ���10�Õ��hՓ�ļ�
�������������w�����OӋ���H��ӑ��
�Y������˹�D���¿��_˹�ݣ�2007��10��1����5�գ�1206-1213��
[4] Sodhi D.S.��Takeuchi T.��Nakazawa N.��Akagawa S.����Saeki H.��1998�꣩��
“��ͬ�ٶ��º��������͉���ԇ�”������^
���ƌW�c���g������161-182�
[5] Billimoria S.��Mukherjee N��Petrovskaya A��Khatib O.“�|�X������”���Ŀ
��档˹̹����W��2008
[6] Tekscan��퓡�Tekscan��˾����[7] ̩��˹���IĿ䛡�Tekscan��˾����
[8] Matsuzawa��T.��Wako��D.��Izumiyama��K.����2006�꣩��“���ϵľֲ������d
“����œ���M��”����18�Ç��H�˙��ϕ����H���hՓ�ļ�
�����}ӑՓ���������������ݣ���2������33-40�
[9] Tekscan��ҕ�lͬ��Ŀ䛣�Tekscan��˾��
[10] Tekscan���|�l����Σ�Tekscan��˾��
Ү.pdf
[11] Tekscan��I-Scan Liteϵ�yTekscan��˾��
[12] Tekscan��I-Scan�ֳ�ʽϵ�y��Tekscan��˾��
[13] Tekscan I-Scanʹ�Ì���Iscan����
��RTO HFM���ҕ��h�ϰl����“�y��ϵ�y”Փ��
32
ʿ���C���ԣ��d���\ݔϵ�y�Ą��¡��OӋ���u��
“��2000��6��27����29���ڼ��ô��˹���e�У��l����RTO AIP-056��
[15] ����ǣ�A.�����˜�ͨ
[16] Tekscan��“��h��ʹ��” |